LUCK8 Online | Cập Nhật Link Truy Cập Mới Nhất 2026

















LUCK8 – Vũ trụ giải trí đỉnh cao dành cho những tay chơi thời thượng. Không đơn thuần chỉ là nhà cái, 22LUCK8 mở ra thế giới cá cược đầy màu sắc với bộ sưu tập game huyền thoại, ưu đãi ngập tràn và trải nghiệm siêu mượt trên mọi nền tảng. Uy tín tuyệt đối, minh bạch rõ ràng, tốc độ vượt trội – đó là ba yếu tố cốt lõi làm nên sức hút của nền tảng này. Hãy khám phá ngay bài viết dưới đây để hiểu vì sao LUCK8 là điểm đến hàng đầu của hàng triệu tín đồ cá cược.
Tìm hiểu về LUCK8 dưới góc nhìn tổng quan
Nhà cái LUCK8 không chỉ đơn thuần là một điểm đến cá cược, mà còn là nơi hội tụ tinh hoa của ngành gambling. Với sự chỉnh chu trong mọi quy trình hoạt động, nền tảng vinh dự đã được các tổ chức có thẩm quyền cấp phép, và hơn thế nữa là những sự tin yêu và ủng hộ từ cộng đồng người chơi.
Sự thành lập và phát triển

LUCK8 được thành lập vào năm 2004, khi công nghệ số còn chưa phát triển mạnh mẽ như hiện nay. Thương hiệu vốn có nguồn gốc là đại lý chính thức của một nhà cái lừng danh châu Âu. Với sự nỗ lực của toàn thể đội ngũ, nền tảng đã có những bước bứt phá, tách ra hoạt động độc lập dưới danh nghĩa pháp nhân mới.
Cũng có lẽ vì sự may mắn, hợp thời mà sân chơi trong 2-3 năm ngắn ngủi đã vươn lên vị trí top đầu, bỏ xa những ông lớn cùng ngành. Với số lượng hội viên vượt mốc 10 triệu, không khí trên nền tảng luôn duy trì sôi động 24/24. Đây là một trong những điểm thu hút tạo nên sự độc đáo, khác biệt khi nói LUCK8.
LUCK8 khẳng định sự uy tín trên thị trường
Niềm tin của thành viên chính là điều được thương hiệu coi trọng. Chính vì thế nhà cái đã xây dựng hệ thống giải trí và các chính sách phù hợp, nhận được công nhận và cấp phép từ tổ chức lớn.
Một trong những yếu tố chứng minh sự uy tín của LUCK8 bao gồm:
- Giấy phép từ PAGCOR, ủy ban về quản lý cờ bạc quốc tế hàng đầu do chính phủ Philippines quản lý.
- Cấp phép từ Curacao eGaming.
- Công nhận từ BVI Financial Services Commission.
- Được GEOTRUST đánh giá là trang web giải trí an toàn, không gây hại cho người dùng.
Không chỉ lấy được niềm tin của thành viên thông qua những cấp phép trên, LUCK8 còn khẳng định được vị trí vững chắc trên thị trường giải trí hiện nay.
Định hướng phát triển dài hạn
Nhà cái hướng đến năm 2030 với mong muốn phát triển thành một thương hiệu toàn cầu, áp dụng công nghệ mới để cá nhân hóa trải nghiệm cho từng hội viên. Nền tảng luôn đặt yếu tố an toàn và minh bạch lên hàng đầu, kiểm soát rủi ro chặt chẽ, khuyến khích chơi có trách nhiệm.
Không chỉ tập trung kinh doanh, LUCK8 còn đồng hành cùng cộng đồng qua các chương trình thiện nguyện. Chiến lược nhân sự, kỹ thuật và hạ tầng được nhà cái phối hợp nhịp nhàng để từng bước chinh phục thị trường quốc tế.
Những điều đặc biệt LUCK8 mang đến cho người chơi
LUCK8 còn được xem là một vũ trụ giải trí nơi đam mê cá cược được thăng hoa. Với hệ sinh thái đa dạng và nền tảng bảo mật vững chắc, thương hiệu mang đến cho người chơi những trải nghiệm độc nhất vô nhị.
Hoạt động giao dịch được hỗ trợ tối đa
Thành viên sẽ được cập nhật giao dịch với nhiều hình thức khác nhau. Hệ thống sẽ đảm bảo quá trình diễn ra một cách mượt mà nhất.
Các phương thức thanh toán
Thành viên được cung cấp nhiều cách thanh toán khác nhau trên hệ thống, bao gồm:
- Chuyển khoản ngân hàng.
- Thẻ cào.
- Ví điện tử.
- Quét mã QR.
Mỗi phương thức đều có biểu mẫu đính kèm cho thành viên thực hiện. Bạn cần đảm bảo thông tin điền vào hệ thống là chuẩn xác. Bên cạnh đó, tiến hành đúng các thủ tục được đưa ra.
Đánh giá chất lượng giao dịch
Chúng tôi đã tổng hợp những đánh giá của người dùng đối với hệ thống nạp và rút tiền của LUCK8. Trong đó có hơn 97% người dùng hài lòng với dịch vụ. Cụ thể:
- Phương thức đa dạng: 9/10.
- Biểu mẫu giao dịch dễ hiểu: 10/10.
- Tốc độ xử lý: 9/10.
- An toàn khi nạp và rút tiền: 9/10.
Thang đo về độ hài lòng khi giao dịch tại LUCK8 là 9.25, đạt ở mức tốt trở lên. Đây là hoạt động vô cùng cần thiết, do đó với độ mượt mà chưa đầy 2’ hoàn thành, hệ thống luôn nhận về đánh giá tốt.
Bảo mật tối tân – Chơi thả ga không lo bị hack
Sự an toàn của thành viên là điều mà thương hiệu chú trọng. Những ưu điểm và đánh giá sẽ được giới thiệu ngay lập tức.
Công nghệ áp dụng
Thành viên tại LUCK8 được đảm bảo an toàn trong từng hoạt động giải trí tại hệ thống. Công nghệ được sử dụng bao gồm:
- Công nghệ mã hóa dữ liệu chuyển đổi thành dạng mã code, đạt chuẩn SSL 128 Bit.
- Cập nhật tường lửa nhiều lớp, bảo vệ thành viên một cách tốt nhất khỏi các truy cập có hại.
- Xác nhận giao dịch thông qua nhiều yếu tố, đảm bảo thành viên không bị kẻ xấu giả mạo.
Chính sách bảo mật cũng được LUCK8 nêu rõ, công khai minh bạch trên hệ thống. Do đó thành viên chỉ cần đảm bảo việc tuân thủ các nguyên tắc, chắc chắn không gặp nguy hiểm khi giải trí.
Đánh giá chất lượng
Về chất lượng khi trải nghiệm, đánh giá cụ thể đã được người chơi đưa ra:
- Công nghệ bảo mật: 9/10.
- Thông tin chính sách minh bạch: 10/10.
- Xác nhận dữ liệu an toàn: 9/10.
Với hơn 99% người dùng đánh giá cao về sự an toàn tại hệ thống, LUCK8 đã khẳng định được sự uy tín của mình một cách tối đa.
Chăm sóc khách hàng cùng hệ thống chuyên nghiệp
Tiếp đến không thể bỏ qua dịch vụ CSKH mà nhà cái đã xây dựng. Bạn sẽ thấy rõ được ưu điểm nổi bật thông qua những đánh giá chi tiết.
Hình thức kết nối
Hội viên sẽ được hỗ trợ kết nối đến trung tâm trợ giúp của nhà cái thông qua nhiều hình thức. Bao gồm:
- Hotline.
- Chat live.
- Telegram/Zalo.
- Email.
Thời gian hoạt động liên tục, phục vụ 24/24 khi người chơi có nhu cầu. Hãy tự tin liên hệ với bộ phận để được trợ giúp một cách kịp thời và nhanh chóng
Đánh giá chất lượng
Những đánh giá của thành viên đã được đưa ra khi trải nghiệm dịch vụ chăm sóc khách hàng tại LUCK8:
- Hình thức liên hệ: 9/10.
- Tốc độ tiếp nhận: 8/10.
- Xử lý thông tin: 9/10.
- Thái độ làm việc: 10/10.
Với lượng thành viên tham gia đông đảo, nhu cầu liên hệ cũng cao hơn. Chính vì thế thời gian kết nối có đôi lúc chậm hơn, bạn chỉ cần chờ đợi đôi chút sẽ được kết nối ngay.
“ALL-IN-ONE” truy cập LUCK8 1 lần trải nghiệm 3000+ sản phẩm
Nhà cái đã hợp tác với nhiều nhà phát hành danh tiếng thế giới như Evolution Gaming, Playtech, Microgaming, Habanero, PG Soft, Pragmatic Play,… Vì vậy hệ thống mang đến những trải nghiệm thi đấu hấp dẫn nhất cho người chơi. Quý hội viên có rất nhiều sự lựa chọn chất lượng thông qua 6 chuyên mục sau:
Trải nghiệm sảnh Casino sang trọng top đầu

Điểm nhấn của LUCK8 chính là hệ thống sảnh Casino trực tuyến đẳng cấp có thể tận hưởng không khí sòng bài thực thụ trực tuyến. Được cung cấp bởi các ông lớn trong ngành như Evolution Gaming và Pragmatic Play,… Casino mang đến các trò chơi kinh điển như Baccarat, Blackjack, Roulette, Sicbo với hệ thống Dealer chia bài chuyên nghiệp, phát trực tiếp theo thời gian thực.
Người chơi vừa được tham gia các ván cược minh bạch mà còn trải nghiệm nhiều biến thể hấp dẫn của các game truyền thống. Nhờ vào công nghệ streaming tiên tiến, hình ảnh sắc nét nên mỗi ván bài tại đây đều tạo cảm giác chân thực.
Nổ hũ với cơn sốt săn Jackpot đầy kịch tính
Sảnh game này được lấy cảm hứng từ các máy quay jackpot xuất xứ từ bắc Mỹ. Với sự hợp tác cùng các nhà phát hành game nổi tiếng, LUCK8 đã làm cho bộ môn nổ hũ đầy màu sắc hơn bao giờ hết. Kho game nổ hũ nổi bật với khả năng mang lại cảm giác khác biệt mới mẻ cùng với hàng loạt câu chuyện lịch sử, văn hoá của khắp các nền văn minh trên thế giới. Có thể kể đến như:
- Nổ hũ bảo thạch Kala: Cảm giác cực đã cùng màu sắc và âm thanh phát ra từ những viên đá quý.
- Nổ hũ Ai Cập cổ đại: Không gian huyền bí từ nền văn minh lâu đời.
- Nổ hũ Tây Du Ký: Ký ức tuổi thơ cùng kiệt tác Trung Quốc nổi tiếng.
- Nổ hũ Sơn Tinh – Thuỷ Tinh: Mang màu sắc cổ tích truyền thống Việt Nam.
- Nổ hũ rừng xanh: Không gian thám hiểm tuyệt vời trong rừng già.
Cược thể thao với thế giới tỷ lệ kèo hấp dẫn

Thế giới thể thao trở nên sống động hơn bao giờ hết với công nghệ truyền phát sóng hiện đại từ LUCK8, mang đến trải nghiệm trực tiếp chân thực và mượt mà. Với đường truyền ổn định, chất lượng hình ảnh HD, nền tảng đảm bảo bạn không bỏ lỡ bất kỳ khoảnh khắc kịch tính nào trên sân cỏ, đường đua hay sàn đấu.
Không chỉ dừng lại ở bóng đá, nhà cái mở ra cơ hội tham gia các bộ môn cá cược đa dạng như Esports, đua xe, golf, cùng hàng loạt kèo cược hấp dẫn từ kèo châu Á, kèo tài xỉu, đến kèo tỷ số. Tất cả đều sẽ được hệ thống cập nhật liên tục để đáp ứng hết mọi nhu cầu của người chơi.
Bắn cá – Ngư dân chinh phục đại dương

Bắn cá chính là thế mạnh của nền tảng khi đã từng hoạt động dưới hình thức offline. Tuy nhiên, ở các phiên bản online đã mang đến sự tươi mới hơn rất nhiều khi đã triển khai hàng loạt tựa game bắn cá với chủ đề, góc nhìn khác nhau. Bắn cá mang tới sự kích thích hơn cả khi người chơi chủ động chọn mục tiêu, nã đạn và tự do thay đổi hoả lực của vũ khí. Sự tiện lợi nhất của các tựa game này nhờ vào khả năng thay đổi mức cược linh hoạt khi trận chiến đang diễn ra. Tiêu biểu nhất trong sảnh game này có thể kể đến:
- TP Tam tiên bắn cá: Game bắn cá góc nhìn thứ nhất.
- Bắn cá rùa xanh: Game bắn cá nhập vai có thể chơi cùng bạn bè.
- Bắn cá thần tài: Mở ra cơ hội ăn thưởng siêu lớn.
- Bắn cá đại boss: Tần suất xuất hiện boss nhiều hơn.
Đá gà – Chiêm ngưỡng vũ điệu của các sát kê
Nếu là một người chơi đam mê những cuộc chiến kịch tính, nảy lửa thì đá gà chắc chắn sẽ là điểm dừng chân hoàn hảo nhất hiện nay. Sảnh đấu sẽ mang đến cho bạn 02 sự lựa chọn giữa NPH AOG và WS168. Mọi sự lựa chọn đều phù hợp với nhu cầu cũng như thế mạnh, kinh nghiệm các thành viên đang nắm trong tay.
Các trận đấu luôn được nền tảng phát trực tiếp xuyên suốt tổng thời gian 24/24 giúp bạn có thể truy cập và xuống tiền vào bất kỳ thời điểm nào trong ngày. Một số phương thức được ưa chuộng hàng đầu mà khách hàng có thể tham khảo gồm.
- Đá gà cựa dao: Một trang bị nhỏ, sắt bén tựa như con dao được gắn dưới chân sẽ giúp các chiến binh sở hữu những đòn đá hoàn hảo với lượng sát thương lơn.
- Đá gà cựa tròn: Phần đầu nhọn được thiết kế nổi bật giúp công cụ dễ dàng đâm vào phần da thịt đối thủ nhanh chóng.
- Đá gà nòi: Ở phương án này, các chú gà sẽ sử dụng sự thông minh, linh hoạt, bản lĩnh của mình để hạ gục đối phương mà không có trang bị bổ trợ.
Xổ số – Cơ hội trúng giải vàng
Xổ số không chỉ là một trò chơi may mắn mà còn mang đến cơ hội đổi đời với cơ cấu giải thưởng hấp dẫn. Các giải thưởng thường bao gồm giải đặc biệt với giá trị lên đến hàng tỷ đồng, cùng nhiều giải phụ như giải nhất, nhì, ba và các giải khuyến khích. Tại LUCK8, người chơi có thể tham gia đa dạng các loại hình xổ số như xổ số kiến thiết, mang tính truyền thống và được tổ chức theo tỉnh thành.
Ngoài ra, hình thức xổ số siêu tốc thu hút bởi kết quả nhanh chóng trong khoảng thời gian ngắn, lý tưởng cho những ai thích nhanh gọn lẹ. Bên cạnh đó, xổ số Keno nổi bật với cách chơi linh hoạt và cơ hội nhận giải thưởng lớn từ những con số chọn ngẫu nhiên.
LUCK8 cập nhật các siêu ưu đãi lớn trong 5/2026

LUCK8 không ngừng mang đến những chương trình ưu đãi độc đáo, tạo sự hứng khởi cho người chơi. Dưới đây là những khuyến mãi đặc biệt mà nền tảng cung cấp:
Thưởng nạp lần đầu
Ngay khi thực hiện giao dịch nạp tiền LUCK8 lần đầu tiên, người chơi sẽ nhận được một phần thưởng tỷ lệ 100% trên tổng số tiền nạp. Ngoài ra còn có cơ hội trở thành người chơi may mắn nhận khoản tiền siêu khủng lên đến 888.888 VNĐ. Đây là cách nền tảng chào đón những thành viên mới, giúp quý khách có thêm nguồn vốn để khám phá các trò chơi hấp dẫn trên nền tảng.
Hoàn trả siêu khủng hàng tuần
LUCK8 áp dụng chính sách hoàn trả siêu khủng, giúp người chơi gia tăng quỹ cược mỗi tuần. Tỷ lệ hoàn trả sẽ phụ thuộc vào từng sảnh cược, dao động từ 1-5%, mang lại sự linh hoạt cho mọi loại hình cá cược. Đặc biệt, số tiền hoàn trả sẽ được cộng vào tài khoản của bạn vào cuối tuần, giúp bạn có thêm cơ hội tham gia các ván cược mới. Đây chính là một trong những ưu đãi nổi bật mà nền tảng mang lại.
Chương trình VIP
LUCK8 tổ chức xuyên suốt chương trình VIP với hàng loạt đặc quyền độc đáo dành riêng cho các thành viên nhiệt thành cùng nền tảng. Người chơi VIP sẽ nhận được ưu đãi độc quyền như quà tặng limited, dịch vụ tư vấn riêng biệt, và các gói khuyến mãi thiết kế riêng theo từng cấp độ. Tích lũy điểm thưởng từ các hoạt động cá cược và duy trì tài khoản hoạt động trong 90 ngày chính là cách để đạt hạng VIP. Cấp bậc càng cao, phần thưởng càng lớn và quyền lợi càng đặc biệt. Trở thành VIP, bạn không chỉ chơi mà còn tận hưởng dịch vụ đẳng cấp!
Khuyến mãi theo event
Nhà cái luôn nắm bắt để tổ chức các chương trình xoay quanh những sự kiện đặc biệt hoặc ngày lễ trọng đại. Các event này không chỉ mang đến ưu đãi đa dạng mà còn tạo cơ hội cho người chơi nhận những phần thưởng giá trị cực cao. Mỗi chương trình được thiết kế theo các chủ đề sáng tạo, mang màu sắc mới lạ theo chủ đề event. Đừng quên theo dõi trang chủ LUCK8 để luôn cập nhật những khuyến mãi mới nhất và không bỏ lỡ cơ hội nhận thưởng lớn!
Quy trình trải nghiệm cá cược LUCK8 chi tiết
Dưới đây là hướng dẫn chi tiết từng bước để bạn tham gia và trải nghiệm nền tảng LUCK8 một cách dễ dàng nhất.
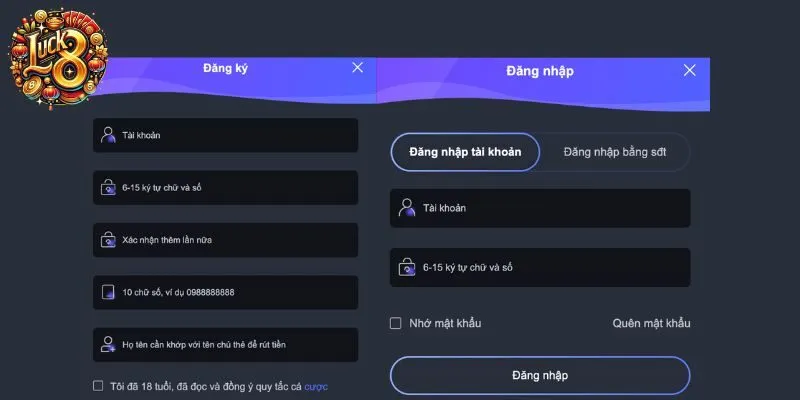
Tạo tài khoản LUCK8
Bắt đầu hành trình trải nghiệm tại LUCK8 thật đơn giản và nhanh chóng chỉ với vài bước cơ bản.
- Bước 1: Truy cập website
Đầu tiên, bạn cần truy cập website của LUCK8 bằng cách nhấp vào đường dẫn https://kylehsu.me/. Ngay trên góc phải màn hình, bạn sẽ thấy nút “Đăng Ký”, hãy nhấp vào đó để bắt đầu quá trình đăng ký.
- Bước 2: Điền thông tin
Tiếp theo, bạn cần điền thông tin cá nhân vào biểu mẫu hiện ra. Các thông tin cần thiết bao gồm họ tên, tên người dùng, số điện thoại, email và mật khẩu. Hãy đảm bảo rằng bạn nhập chính xác để tránh những rắc rối sau này.
- Bước 3: Xác minh tài khoản
Sau khi hoàn tất biểu mẫu, hệ thống sẽ gửi một mã OTP về số điện thoại mà bạn đã đăng ký. Bạn cần kiểm tra tin nhắn và nhập mã này vào hệ thống để xác minh tài khoản. Bước này giúp đảm bảo tính bảo mật và xác thực thông tin của bạn.
- Bước 4: Nhận thưởng VIP
Cuối cùng, ngay khi quá trình đăng ký hoàn tất, bạn sẽ nhận ngay phần thưởng chào mừng dành cho thành viên mới. Đây là món quà ưu ái từ LUCK8, giúp bạn có thêm nguồn vốn để khám phá các trò chơi hấp dẫn trên nền tảng.
Tiến hành giao dịch
Nạp tiền vào tài khoản LUCK8 là một quy trình vô cùng đơn giản và thuận tiện, giúp bạn nhanh chóng có được nguồn vốn để tham gia các trò chơi hấp dẫn. Chỉ cần bạn thực hiện theo vài quy trình cơ bản sau:
- Bước 1: Đăng nhập LUCK8
Đầu tiên, bạn cần đăng nhập tài khoản LUCK8 bằng cách sử dụng thông tin đã đăng ký trước đó. Sau khi đăng nhập thành công, hãy tìm và nhấp vào mục “Nạp Tiền” trên giao diện chính của trang web.
- Bước 2: Chọn kênh thanh toán
Tiếp theo, bạn sẽ được hệ thống yêu cầu chọn lựa phương thức thanh toán. LUCK8 hỗ trợ đa dạng các kênh giao dịch như chuyển khoản ngân hàng, ví điện tử (Momo, ZaloPay) và thẻ cào viễn thông. Tùy vào sự tiện lợi của mình, bạn có thể lựa chọn phương thức phù hợp nhất.
- Bước 3: Nhập số tiền
Sau khi chọn phương thức, bạn cần nhập số tiền muốn nạp vào biểu mẫu hiển thị. Hãy kiểm tra kỹ thông tin và tiến hành xác nhận giao dịch.
- Bước 4: Hoàn tất
Cuối cùng, chỉ trong vài giây, số tiền của bạn sẽ được cộng ngay vào tài khoản game, sẵn sàng để bạn tham gia và chinh phục mọi tựa game yêu thích.
Quá trình cài đặt APP LUCK8

Nếu bạn muốn có quá trình trải nghiệm giải trí linh động, hãy tải app LUCK8 ngay. Để tải ứng dụng cá cược của nhà cái về điện thoại và trải nghiệm một cách tiện lợi, mượt mà, bạn chỉ cần thực hiện theo các bước đơn giản sau. Lưu ý, điện thoại của bạn cần đáp ứng các yêu cầu tối thiểu: Ram 2GB trở lên, bộ nhớ trống hơn 1GB, và mạng Internet đạt chuẩn 4G trở lên.
- Bước 1: Truy cập link tải
Đầu tiên, người chơi cần truy cập vào trang chủ chính thức của LUCK8. Tại đây, hãy tìm kiếm mục “Tải App” thường được hiển thị rõ ràng trên giao diện. Nhấn vào liên kết này để được chuyển hướng đến trang tải ứng dụng. Đây là bước khởi đầu quan trọng để bạn có thể tải về phiên bản ứng dụng phù hợp với thiết bị của mình.
- Bước 2: Chọn phiên bản phù hợp
Sau khi truy cập vào trang tải ứng dụng, bạn sẽ thấy các tùy chọn phiên bản dành cho Android và iOS. Tùy thuộc vào hệ điều hành của điện thoại bạn đang sử dụng, hãy chọn phiên bản tương ứng. Ví dụ, nếu bạn dùng điện thoại Samsung, hãy chọn phiên bản Android; nếu bạn dùng iPhone, hãy chọn phiên bản iOS. Việc chọn đúng phiên bản giúp đảm bảo ứng dụng hoạt động ổn định và tối ưu trên thiết bị của bạn.
- Bước 3: Tải & cài đặt app
Khi đã chọn đúng phiên bản, bạn chỉ cần nhấn vào nút “Tải về” để bắt đầu quá trình tải ứng dụng xuống điện thoại. Sau khi tải xong, hãy mở file cài đặt và làm theo hướng dẫn trên màn hình để hoàn tất việc cài đặt. Quá trình này thường diễn ra nhanh chóng và không yêu cầu nhiều thao tác phức tạp.
- Bước 4: Khởi động và đăng nhập
Sau khi cài đặt thành công, hãy mở ứng dụng từ màn hình chính của điện thoại. Tiếp theo, đăng nhập bằng tài khoản mà bạn đã đăng ký trước đó. Nếu chưa có tài khoản LUCK8, bạn có thể đăng ký acc ngay trên ứng dụng. Sau khi đăng nhập, bạn có thể bắt đầu khám phá và trải nghiệm các tính năng, trò chơi hấp dẫn mà nhà cái mang lại.
FAQ tại LUCK8 – Những câu hỏi phổ biến nhất về sân chơi
Trong quá trình khám phá cổng game, đôi khi bạn có thể gặp những băn khoăn phổ biến. Hãy tham khảo một số thắc mắc thường gặp để hiểu rõ hơn về sân chơi này.
Người chơi đặt cược được tối đa bao nhiêu 1 ván?
Bạn chỉ cần bỏ ra khoản chi phí cực kỳ nhỏ để tham gia hầu hết trò chơi trên nền tảng. Các mức cược tối thiểu luôn được hiển thị rõ ràng trước khi bạn xác nhận giao dịch. Trong trường hợp còn phân vân, bạn hãy tham khảo mục hướng dẫn ở từng sảnh cược. Nhà cái muốn đảm bảo ai cũng có cơ hội trải nghiệm dịch vụ mà không gặp rào cản ngân sách. LUCK8 xây dựng chính sách linh hoạt này để khuyến khích mọi người giải trí một cách thoải mái nhất.
Tại sao tài khoản bị khóa sau khi nạp tiền?
Một số trường hợp nạp tiền sai thông tin hoặc có dấu hiệu giao dịch bất thường sẽ kích hoạt cơ chế bảo vệ. Hệ thống sẽ tạm khóa tài khoản để kiểm tra, đảm bảo an toàn cho cả người chơi và nền tảng.
Bạn hãy liên hệ ngay đội ngũ chăm sóc khách hàng để được hỗ trợ xác minh thông tin. Nếu giao dịch là hợp lệ, tài khoản sẽ mở lại trong thời gian ngắn. LUCK8 xây dựng quy trình này với mục tiêu ngăn chặn các rủi ro liên quan đến lừa đảo.
Cần bao lâu để được hỗ trợ khi gặp sự cố?
Đội ngũ chăm sóc khách hàng làm việc 24/7, sẵn sàng hỗ trợ qua nhiều kênh liên lạc như chat trực tuyến, email hoặc hotline. Khi gặp trục trặc kỹ thuật, bạn hãy miêu tả vấn đề càng chi tiết càng tốt để nhân viên giải quyết nhanh chóng.
Thông thường, các lỗi đơn giản được khắc phục ngay trong vòng vài phút, những trường hợp phức tạp hơn sẽ cần thời gian xem xét thêm. LUCK8 đặt lợi ích người chơi lên hàng đầu nên luôn cố gắng phản hồi sớm nhất cho tất cả yêu cầu.
Tạm kết
Luck8 nhà cái uy tín là điểm đến hoàn hảo cho những ai yêu thích giải trí trực tuyến. Với đa dạng dịch vụ, chất lượng vượt trội, cùng chính sách ưu đãi hấp dẫn và bảo mật tối ưu, Luck8 mang đến trải nghiệm giải trí đỉnh cao. Hãy tham gia ngay hôm nay để không bỏ lỡ những giây phút thú vị!